

Robotic Explorer for Hypothesized Surfaces – ROBEX
INSTITUTION
University of Texas – Tyler (UTT)
CLASS
Iridium Class (2024 – 2025)
STUDENT TEAM
ACADEMIC GUIDANCE
Professor Mohammad (Rafe) Biswas
PROJECT DESCRIPTION
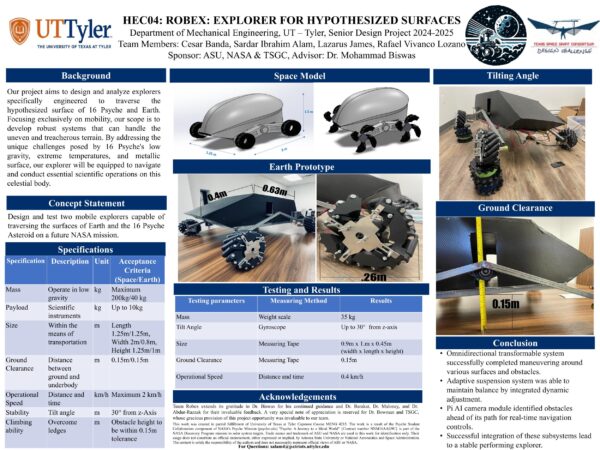
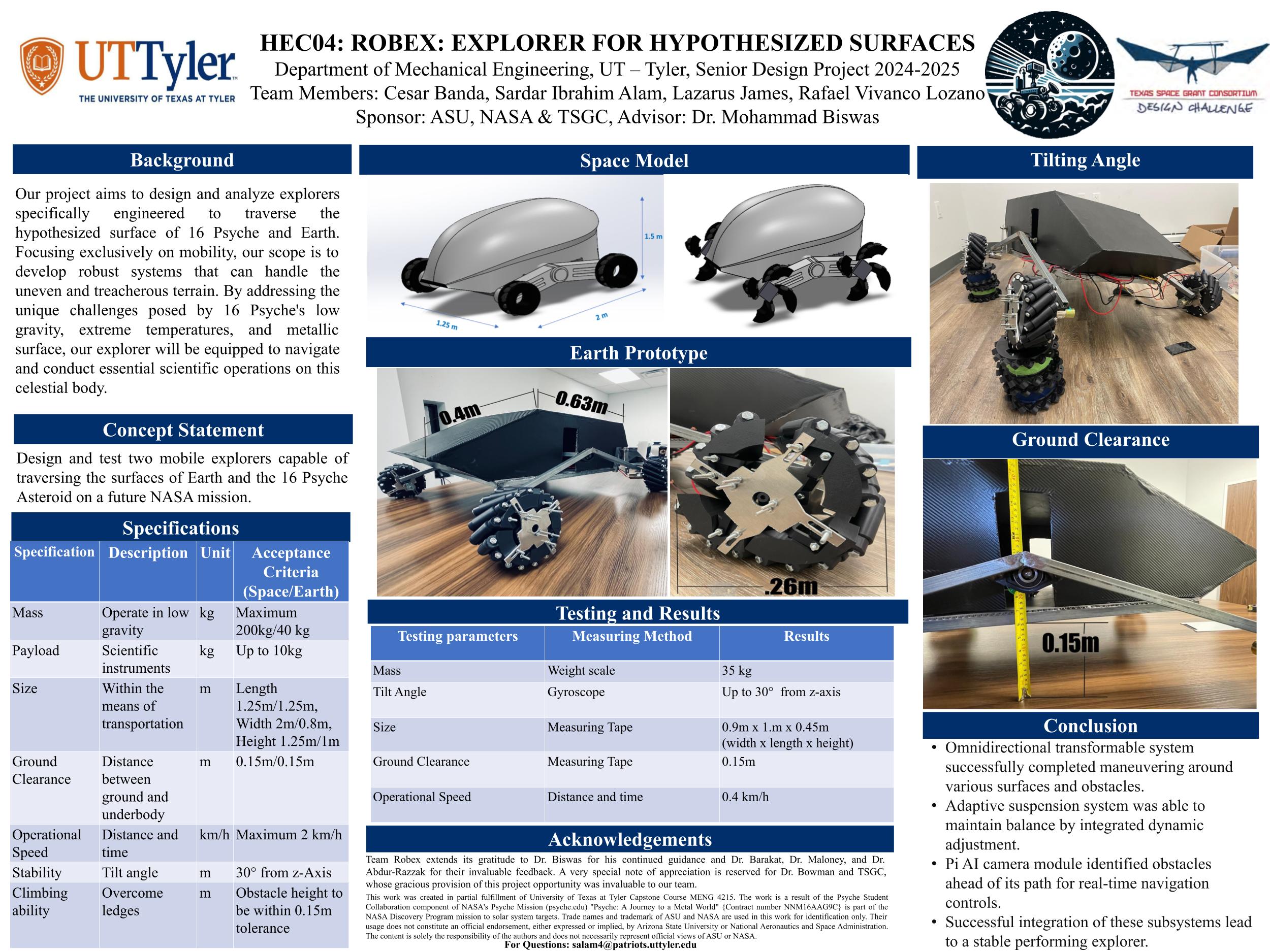
Our project focuses on developing an omnidirectional transformable system designed to traverse the uneven surfaces of both the 16 Psyche asteroid and Earth. This innovative system is engineered to adapt to the extreme conditions and varied terrains encountered on 16 Psyche, where the gravity is approximately 0.144 m/s2, and surface temperatures range from -200°C to – 73°C. The system’s ability to reconfigure its movement mechanics ensures optimal stability and efficiency, making it the ideal choice for planetary exploration based on our precise calculations. The versatility and resilience of this design not only enhances mobility across rugged landscapes but also significantly advances our understanding of planetary formation and structural separation, providing invaluable insights into the early stages of planet development.



{kind=link}