Robotic Explorer for Hypothesized Surfaces – Debug Thugs
INSTITUTION
Arizona State University (ASU)
CLASS
Iridium Class (2024 – 2025)
STUDENT TEAM
Jake Grunewald, Electrical Engineering
DJ Lopez, Electrical Engineering
Parsa Fares, Electrical Engineering
Jared Schottin, Electrical Engineering
Chiran Verma, Electrical Engineering
DJ Lopez, Electrical Engineering
Parsa Fares, Electrical Engineering
Jared Schottin, Electrical Engineering
Chiran Verma, Electrical Engineering
ACADEMIC GUIDANCE
Prajjwal Dutta
Prof. James McDonald
PROJECT DESCRIPTION
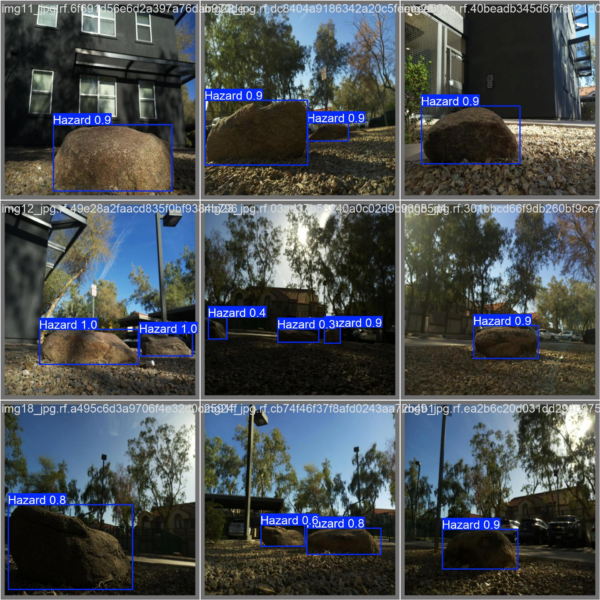
We designed an autonomous rover to navigate the rugged surfaces of the asteroid Psyche. From our research, it is expected that a rover on Psyche will face harsh conditions such as craters, rocks, and uneven surfaces that could hinder proper data collection.
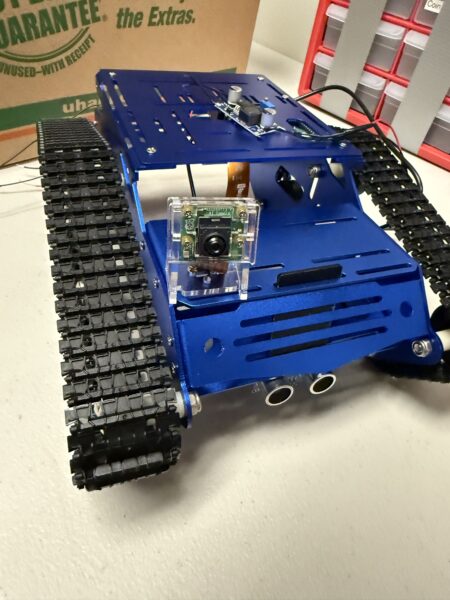
To combat this, our rover contains an AI hazard detection model, Raspberry Pi, remote control GUI, and live camera feed to enable proper data collection. The goal of our project was to design a rover that is durable and able to withstand anything that is thrown at it during its deployment.