Hypothesized Surface: ISRU for Hypothesized Surfaces – Arkansas Razornauts
INSTITUTION
University of Arkansas
CLASS
Tungsten Class (2023 – 2024)
STUDENT TEAM
Chris Stites, Mechanical Engineering
Denton McCullough, Mechanical Engineering
Orion Buster, Mechanical Engineering
Richard Lundsgaard III, Mechanical Engineering
Denton McCullough, Mechanical Engineering
Orion Buster, Mechanical Engineering
Richard Lundsgaard III, Mechanical Engineering

ACADEMIC GUIDANCE
Mr. Jason Bailey
PROJECT DESCRIPTION
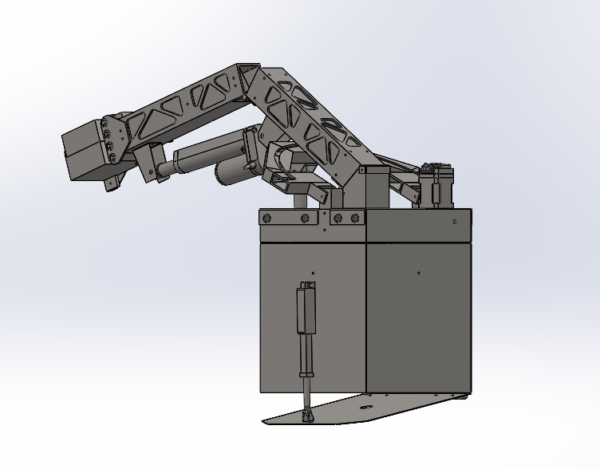
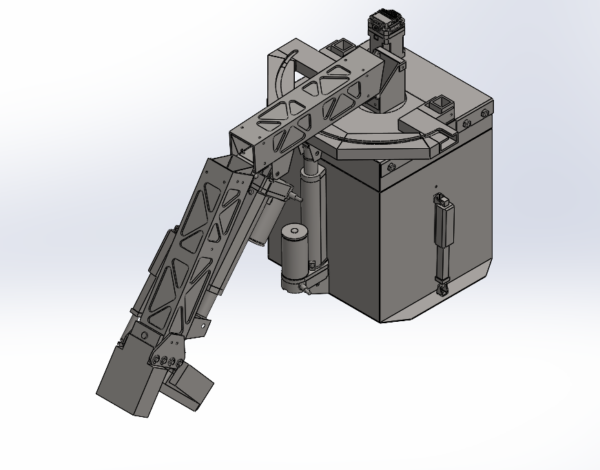
The Arkansas Razornauts are developing a prototype that is meant to be a resource-collecting rover attachment, but could easily be iterated to be a self-propelled digging apparatus. The teams’ prototype specializes in loose aggregate collection in the 0-1 square inch range and prioritizes collection attempts. The prototype is loosely based on an excavator on Earth as it features linear arm movement and a digging field of roughly 160 degrees. However, it differentiates from an excavator because the prototype incorporates a hollow arm that allows sample movement and storage within the body of the prototype.